")
В оборудовании, где необходимо контролировать несколько осей (например, роботы), прокладка кабелей для каждого датчика в отдельности может быть очень затратной, особенно при высоком разрешении датчиков когда требуется применение многожильного кабеля. В этом случае решить проблему может использование синхронно-последовательного интерфейса (SSI). В данном методе передачи данных для подключения каждого датчика нужно лишь две витых пары, т.е. одна для тактового сигнала и вторая для сигнала данных. Для подключения питания требуется два провода (также как и для параллельного интерфейса). Специальные дифференциальные драйверы для RS 422/485, которые вырабатывают симметричный выходной сигнал, позволяют передавать сигнал на расстояние до 1200 метров при скорости передачи до 10 Mbit /сек. Максимальная скорость передачи зависит от длины кабеля. В большинстве случаев этой скорости достаточно для решения поставленной задачи.
Принцип работы SSI - интерфейса
При таком виде интерфейса данные о позиционном положении оси датчика передаются синхронно с принятым сигналом такта (CLOCK) от системы управления. В состоянии покоя, уровень сигнала, как на тактовом проводе, так и на проводе данных равен 1 ( High ). Как только тактовый сигнал в первый раз в начале каждой тактовой посылки поменяет свой уровень с высокого на низкий, находящиеся внутри датчика бит-параллельные данные в параллельно-последовательном преобразователе Input - Latch сдвигового регистра по внутрисхемно выработанному сигналу (Sload = Shift Load), "замораживаются". Этим достигается, что данные во время последовательной передачи позиционного значения больше не изменяются. Со следующим перепадом от низкого уровня на высокий начинается передача позиционного значения причем начиная со старшего (MSB) бита. С каждым последующим перепадом с низкого на высокий уровень передается следующий более младший бит информации. После передачи последнего, т.е. самого младшего (LSB) бита с последним перепадом тактового сигнала от низкого уровня на высокий выход данных устанавливается в Low (конец передачи).
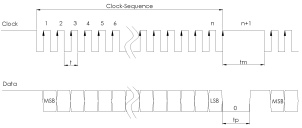
Принцип SSI-передачи
Встроенный одновибратор настроенный на частоту tm определяет время после последнего нарастающего фронта тактового сигнала по истечению которого датчик снова готов для следующей передачи. Этому времени (tm) равно так же минимальное время между двумя друг за другом следующими тактовыми посылками.
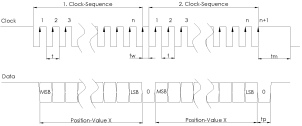
Существует два способа передачи позиционного значения: однократный и многократный. Для передачи позиционного значения на тактовый вход датчика (CLOCK) должно быть подано определенное число (n) тактовых импульсов. Для однократной передачи это число содержит n =13 для варианта исполнения Singleturn и n =25 для Multiturn . Многократная передача позиционного значения достигается путем удвоения (или умножения) количества тактовых импульсов т.е. числа n.
Нужно так же всегда учитывать необходимость прибавления n +1=14 тактов для Singleturn - или n +1=26 тактов для Multiturn -исполнения.
Последний перепад от "L" на "H" тактового сигнала одной, например, 26-тактовой-посылки сопровождается выдачей на выходе данных (DATA) L -сигнала. Этот сигнал и является информацией для разделения друг за другом следующих двухкратных (или многократных) тактовых посылок (см. рис. ниже).
Читайте также нашу статью: "Рекомендации по установке и подключению энкодеров с SSI-интерфейсом"